
……Or, the complexities of developing the geometry and parametric properties of a self- evolving 2d Architectural design. Because keep in mind that although we are guiding the system here we are not DIRECTLY drawing the solution out on paper. We are in fact leaving a lot of the organizing ,calculation and discrimination to the system.
As the title indicates, it is indeed difficult for a designer or artist to find out exactly what makes a “viable Architectural concept”. And believe me when I say that this creative difficulty is something on the mind of most Architects on a regular basis. When it comes down to it, most people credit their ideas to a few different aspects but by far most people accredit their solution to an intuitive idea about the right concept in relation to a geographical, cultural or topological location.
Specifically I propose something that while it can not be said to be entirely different, can be said to introduce something new into the paradigm of Architectural Design.
This post is technical, and will introduce a lot of concepts that are not trivial. As described the B- types of blog posts WILL be technical, and so I will use ( and make reference to) a lot of software and specialized terminology. In parallel with displaying the process of my work I will here also display my technical endeavors, including web site, server and database functionality. This is because those are parts of my chosen expression, and because I believe in the temporary properties of digital data, this being a process- based blog. Feel free to jump back and forth between technical descriptions while reading as concepts can to a certain degree be enjoyed as autonomous exercises. (They were for me…).
Trying to find a rational starting point I propose finding the general specifics, the averages, of successful floor plans used in successful high- rises. I propose using these for fitness approximations for my own evolutions. My approach is based on combining the traits of “successful” solutions in floor plans in high – rises and putting a value on the traits that make them highly valued. This kind of fitness – ranking can be traced back to the research and literature of Rosenman, Gero & Schnier.(Sources) On the home pages of the Council on Tall Buildings and Urban Habitat there is a list of the tallest office high rises as of today. I will mainly base my early work on these projects although not all of these 100 will make up my average, as some of these buildings do not conform to the “one- body” restriction that I have chosen for my project. ( The building should be a single free- standing Architectural structure. This is for simplicity).
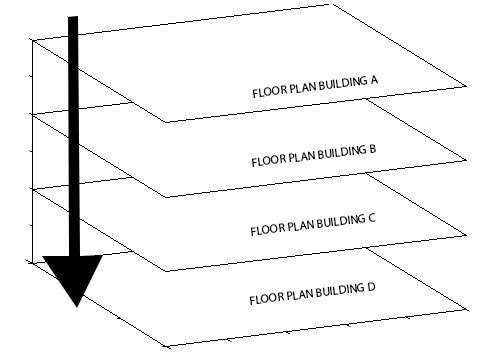
The elevators and the placement of them are examples of the traits that carry over from project to project. The spine of the building, they are usually situated in the middle of the building and make up the core structurally. Traditionally this is the case and it frees up space for the outer parts of the building. You could argue that this solution is sound both structurally and in regard to space layout planning and access to sunlight. This is a good example of the traits I talk about in former post when I propose superimposing all the high- rise plan drawings upon each other. Why ? Because they make for good averages/generalizations of what is out there in the built environment today, and the public and formal precedents that implicitly follow. If the perimeter of the buildings are roughly the same within city blocks and there are only small deviations in the plan layouts – what are the factors that account for the differences in high- rise building design ? The city block is one parameter, but there are more. In fact it is only the beginning. A beginning that will be a general starting point for evolving a large number of floor plans and from there, high rise proposals for an eventual manual evaluation.
It is very important here to clarify the connection between the heuristic approach of manually choosing and working with a certain set of floor plans and the fitness functions for the plan drawing generation. The whole point here is to make the computer focus in a manner similar to the human mind, while at the same making use of the extreme calculating advantage that “it” has. The way humans do that is by narrowing the field of interest like I am proposing here, while still trying to keep their options open to be creative. So using historical “successes” should be seen in the heuristic context and as an alibi for shrinking down the universe of possible solutions to a problem. Using Formal grammar language notation within the realm of evolutionary computation, simple plan elements or whole floor plans carry over and interpret into basic and evolved genes that can be used as fitness approximations and comparisons to my stochastically-populated individuals. (I do not use the word “random” here as it would be somewhat incorrect. While people in general would appreciate the value of the word, random entails selection of entities without prejudice. Stochastic selection holds traits of darwinian evolution, where certain entities are fitter and more prone to be chosen for selection). The way I will secure success in this process is by making “successful” existing floor plan drawings the targets for my evolution. If I can manage to reproduce them efficiently it stands to reason that I could thereby optimize them, approximate them mathematically and develop them further, by the hand of their own creators so to speak. How do we make sure that what we are producing are in fact valuable results ? Like I have mentioned above, one way is by heuristics; our common evaluation of what has already been accepted as successful, and indeed been built and used.
I introduce the idea here of shapes that are also aware of their placement within a perimeter of a city block or a floor plan.This is done in 3d software by using vertices or vectors. programmaticaly you use pointers between shapes/elements so that they can relate within a coordinate system. You move around the vertices as a point cloud and keep track of how they are connected using segments.
By trying to evolve copies of the generalized floor plans in as few generations as possible. (Think of the generations as concentric circles), you can optimize the evolutionary search according to the design problem. After some optimization is done we can then try to develop beyond the floor plan we had set as target, and see what comes from this. It is maybe easy to digress here but I will keep that digression to a minimum and propose something for later – namely that WHEN we later indeed move into 3 dimensional space we will be parameterizing in accordance to the 2dimensional evolution – that is for each time we evolve the plan, the elevation will change accordingly. Later I will start Introducing built High rise Projects in short, then their floor plans and their main plan/ elevation – elements. Then I will compare floor plans and their components. For now I include the idea so that the concept is somewhat more tangible.
What I want to do then in essence, is to develop a grammar that can take simple graphical elements like combined line segments and evolve them into my chosen floor plans, in as few steps as possible. Looking at the next animation, a way to visualize the development process I am talking about, can be seen. We start off with the simplest of right- angled elements , using simple grammar to develop. When we then hit “jackpot” with the completion of a heuristically chosen, successful “gene”( Floor plan element), that evolved gene is picked up “automatically” and brought into the next generation. The automation has to be programmed as a parallel running process of course, operating in between the generations of individuals(Populations). You can see the generations as different animations on the dial, and you can also see how the search spaces( numbered) are restructured for each generation. The search spaces are visualized here as concentric circles, moving from the start to the finish. While it takes a lot of generations to find the evolved gene in the first animation, the same result is produced much earlier after the “evolved genes” are detected. Like “unbreakable” chromosomes or atoms they retain their properties through evolution and make the search spaces and calculations smaller and simpler. You can clearly see below how simple notations can evolve into sophisticated ones. These are well known concepts from genetics which have been carried over into computation and “artificial life”. (Click the black space).
I would like to introduce also the operations of the Genr8 plugin, the software plugin introduced into Autodesk Maya 3d software through the C++ Application Programming Interface. The way in which I introduce it is by comparing its strategic and geometric calculations to those in genetics, and I go on to introduce these calculations and their significance into the realm of architecture. This is an extremely important point to make, because of the scientific significance that the work by the likes of A.Lindenmayer, Rosenman, Gero & Schnier.( lit. reference) have had on cross- professional studies. Growth of cells, plants and individuals in nature has influenced many an artist, as well as professionals in different sciences. What we are seeing in addition now however is the bilateral communication and exchange of knowledge between natural sciences like genetics, and the artificial environment of evolutionary computing(EC) and genetic algorithms(GA).
The way I move forward now is to describe geometric operations mathematically and their presentation within the C++ programming language.
By way of explaining what kind of synthetic construct I am trying to build here I re- present a class diagram from earlier posts, although now a bit more detailed.
An object in this system is instantiated in the World class. It is in essence well described by this word, but I will explain it here as it brings together all the elements of the L-Systems, how they are developed, and how Autodesk Maya represents the surfaces generated by these constructs. Scaffold is a big C++ class that handles the internal model of the surface being generated by the plugin. The internal model is basically a graph data structure, although a bit more complicated. It works like this:
The grammar operates on geometric segments(geometric curves or parts of curves), so you need to keep track of those segments to be able to apply the evolutionary productions. The parser(A parser is a software component that takes input data (frequently text) and builds a data structure – often some kind of parse tree, abstract syntax tree or other hierarchical structure – giving a structural representation of the input, checking for correct syntax in the process), uses a syntax similar to that used in a makefile for a programming language make build automation tool.
Getting to the point – I am making a connection between these kind of grammars, Turtle Graphics that I described in blog post B3 and lastly the development of basic algorithms for evolutionary systems. The whole idea here is to identify “genes”(decoded as turtle graphics movement described by grammars) that can be used to evolve floor- plan elements for high rises, and in turn be parameters for elevation into the third dimension. One of the special features of the human intelligence is the ability to focus. What this means is that the human mind focuses and refocuses as if to be able to search large “spaces” of solutions and find essential elements. Naturally Artificial Intelligence would want to do the same. The big difference being that the machine would potentially be able to do the pure calculating operations a lot faster. Rosenman, Gero and Schnier & Sivanandam & Deepa(2007) have theorized this in the cross- disciplinary domain of Architectural Design and genetics. There are differences in the notations of natural evolution genetics and Genetic Algorithms of course;
– The Chromosome in natural evolution is replaced in Evolutionary computation and Genetic Algorithms by the computer language bit string.
– The Gene is represented by the feature or character.
– The Allele is represented by the value of the feature.
– The locus is represented by the position of the string.
– The Genotype is represented by the structure or coded string.
– The Phenotype is represented by the parameter set/decoded structure.
My way of singling out “evolved genes” is not heuristic, but it singles out these genes by using heuristically developed fitness functions. I use more or less common sense to identify shapes that reoccur when superimposing large amounts of high rise floor plans upon each other. Starting with this form of case- based design, the process will be automated soon enough as the only interest in this manual enterprise is to find a sort of common ground upon which most people will have to agree. That common ground represents the floor plan elements that have indeed been developed and evolved by designers during the last centuries. As such my ideas are not radical. Speaking then in terms of genes, a genotype can be expressed in turtle graphic notation as a simple directed line/simple combination of directed lines, in geometrical space, and a phenotype can be described as its potential successor. A floor plan can indeed hold many of these.
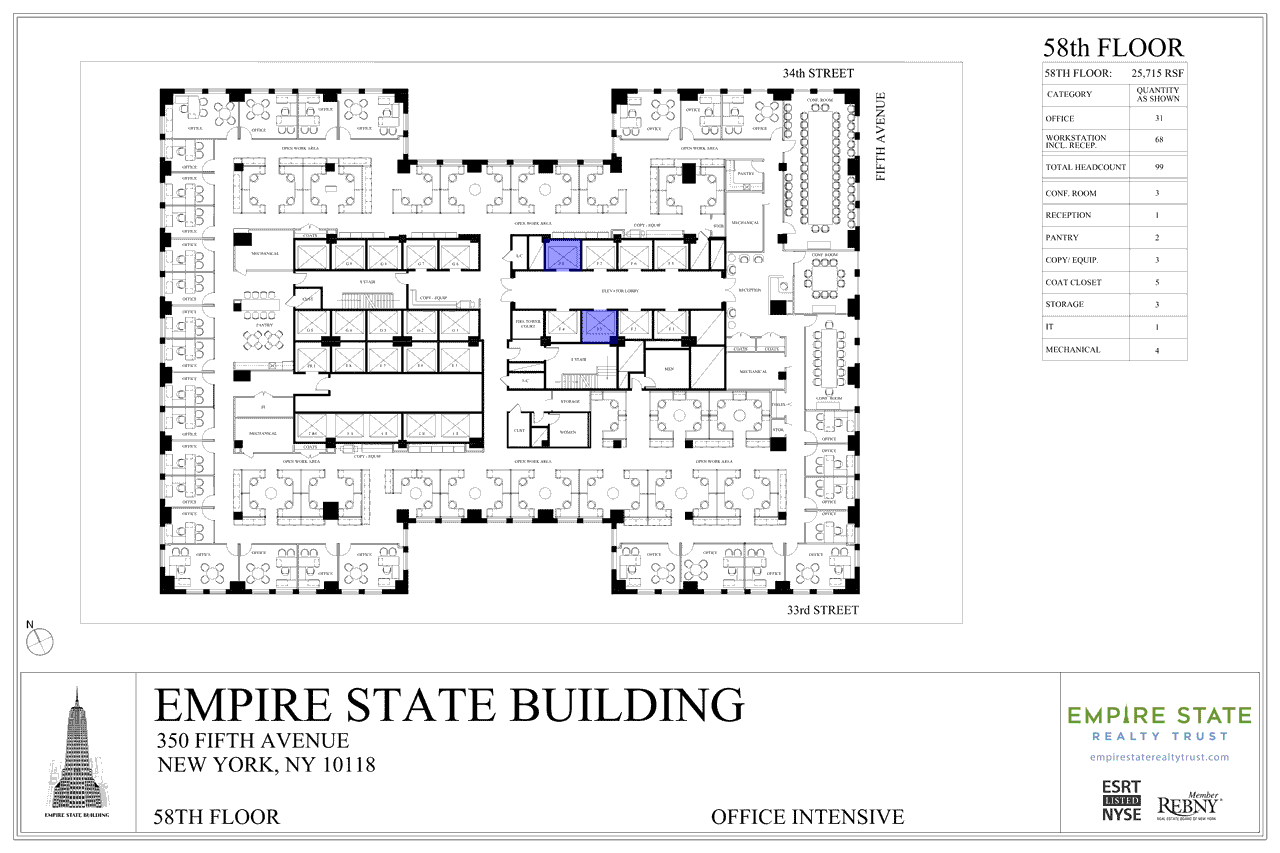
As I have touched upon earlier and as you can clearly imagine from the drawing above, some elements in a floor plan like this stand out pretty clearly. You would have no problem imagining the simple description of e.g the elevator shafts as a quadratic element of its own.
So manually identifying some of them and decoding them is a form of reverse engineering them for sure. As long as a coherent combination of basic genes is then found to exist in a multitude of Architectural floor plans then I would personally see that as an exciting angle from which to proceed, in regards to evolving new floor plans. Theorizing, the evolved genes could then be isolated (more/less) as structural elements are in nature, to make calculations more efficient.
Anything you describe int the real world, when interpreted into a digital environment like a 3d software, most likely has to be described by vertices. For movement in the Autodesk Maya geometrical space we use points, i.e vertices. So the vertices are like a point cloud and we keep track of how they are connected using segments, like polygons. The reason I mention this is in reference to the generation of the surfaces of the original Genr8 Autodesk Maya plugin. My aim is to develop this system further.
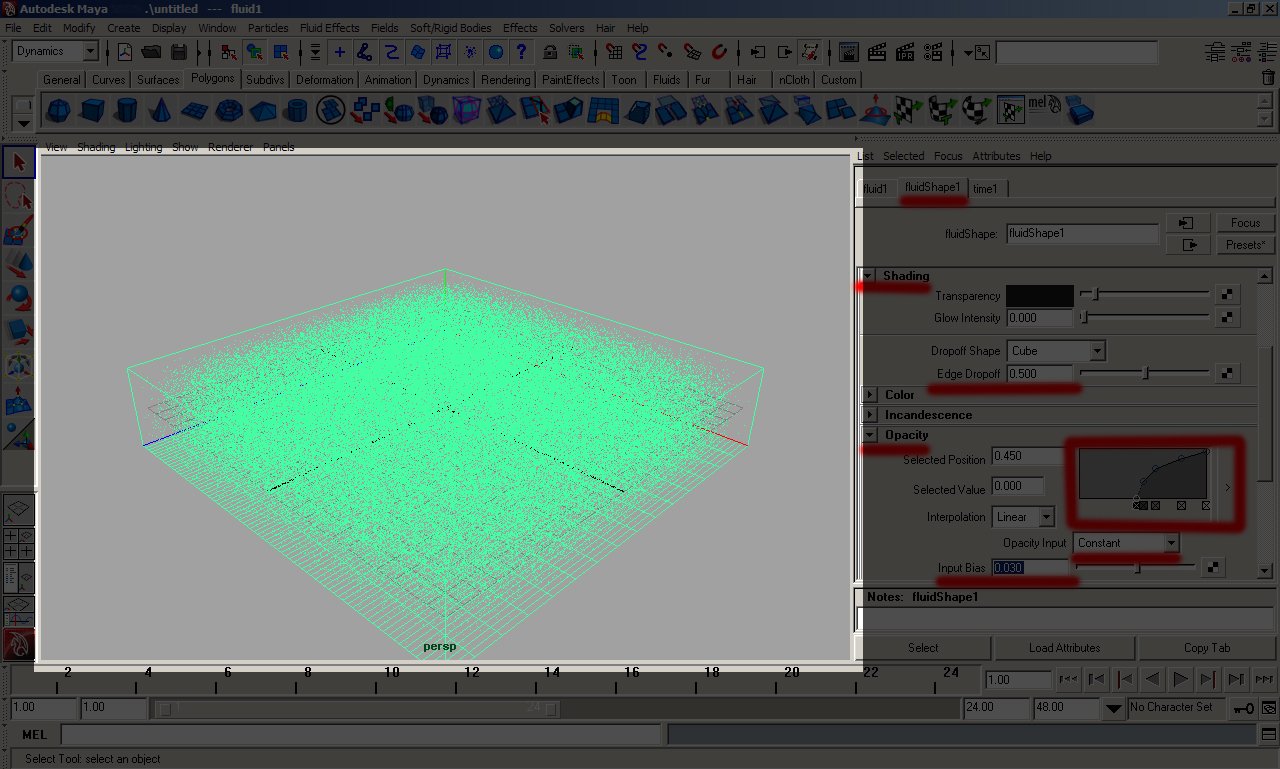
While the Genr8 plugin makes surfaces of polygons, I want to evolve floor plans as the first step, before using a modified Genr8 plugin to evolve the third dimension.